
The purpose of digital delivery is to move UDOT away from static data and instead use dynamic data to represent the current state of every asset.
Corey Unger
Spatial Technologies Manager, UDOT
고객
UDOT(Utah Department of Transportation)
챌린지
유타주의 날씨는 변동이 심하므로 최적의 도로 스트라이핑을 계획하고 구현하기가 어렵습니다. 또한 UDOT가 이러한 도로를 효과적으로 유지관리하기에는 도로 상태 관련 확보한 데이터가 부족했습니다.
솔루션
UDOT는 디지털 트윈을 구성하기 위해 Site Scan for ArcGIS 기반으로 드론 데이터를 수집하기 시작했습니다. 또한 UDOT는 자산을 수작업으로 디지털화하는 방식에서 자동 프로세스를 활용하는 자산 감지 방식으로 전환하기 위한 머신 러닝 모델 및 방법을 구축하는 데 도움을 받기 위해 Esri Advantage Program을 통해 Esri와 협력했습니다.
결과
드론 영상 및 디지털 전달을 통해 UDOT는 모든 자산의 현 상태를 보여주는 동적 데이터를 확보했습니다. 지속적인 자동화 및 머신 러닝 작업을 결합하자 UDOT는 최적의 주행 경험을 제공할 수 있도록 도로를 보다 효과적으로 유지관리할 수 있게 되었습니다.
UDOT(Utah Department of Transportation)는 주립 고속도로 시스템의 계획, 설계, 건설, 유지관리, 운영을 책임지고 있습니다. 주요 도로를 유지관리하고 주간 고속도로를 포함한 장거리 교통 흐름을 주관합니다. UDOT의 팀원들은 우수한 도로는 비용이 적게 들며, 도로를 사전 예방적으로 보존하면 현재와 미래의 인프라 가치를 극대화할 수 있다고 생각합니다.
 드론 영상은 유타주 고속도로 시스템의 조감도를 제공합니다.
드론 영상은 유타주 고속도로 시스템의 조감도를 제공합니다.
UDOT가 자산의 위치와 상태를 파악하자, 이동하는 시민들에게 최상의 이점을 제공할 수 있도록 유지관리 및 건설 작업의 우선순위를 조절해 투자 효율성을 향상하는 데 도움이 되었습니다. UDOT는 자산 위치 데이터를 교통량, 속도 제한, 사고 빈도 및 심각성 등의 기타 도로 특성과 결합해 활용성이 극대화되도록 프로젝트 우선순위를 조절할 수 있습니다. 이러한 자산의 디지털 표현을 정확하고 최신 상태가 반영되도록 해야 가장 유용하게 활용할 수 있습니다.
UDOT는 매년 모바일 라이다를 사용해 노면 정보를 수집합니다. 노면의 스트라이핑 및 표시를 추적하는 것은 중요합니다. 다양한 주행 작업 정보를 그 어떤 교통 통제 기기보다도 효과적으로 도로 사용자에게 전달하기 때문입니다. 최근의 연방 고속도로 관리 보고서에 따르면 미국은 매년 노면 표시에 약 20억 달러를 투입하고 있습니다. UDOT의 공간 기술 관리자인 Corey Unger는 다음과 같이 말합니다. "이는 운전자는 물론 신흥 자동 주행 기술에도 도움이 됩니다."
노면 표시를 유지관리하는 것이 중요하지만, 유타주의 날씨는 변동이 심하므로 이는 결코 쉬운 작업이 아닙니다. 날씨 변동폭이 넓어 최적의 스트라이핑 유형을 계획하고 구현하기 까다로우며, 이로 인해 UDOT는 비판을 받아 왔습니다.
 유타주의 날씨는 변덕이 심해 검사 및 유지관리 작업이 까다롭습니다.
유타주의 날씨는 변덕이 심해 검사 및 유지관리 작업이 까다롭습니다.
스트라이핑 등의 자산을 전체 수명 주기에 걸쳐 더 효율적으로 유지관리하기 위해, UDOT는 프로젝트를 관리하는 방식을 디지털 전달 방법으로 변화시키고 있습니다. 이는 현장에서 프로젝트 설계 데이터를 이해, 열람, 사용하는 새로운 방식을 기관에 제공합니다. UDOT에 있어 디지털 전달은 프로젝트 전달 프로세스의 디지털화를 의미합니다. 설계부터 건설, 향후 프로젝트 계획 및 실행을 위해 데이터를 자산 관리 팀으로 반환하는 것에 이르는 프로젝트 수명 주기의 각 단계에서 데이터는 디지털 방식으로 컴파일되고 제공됩니다. 이러한 변환 덕분에 UDOT는 유타주 교통망을 구성하는 모든 물리적 자산의 디지털 트윈, 즉 디지털 표현을 생성할 수 있게 되었습니다. 이는 강력하면서도 확장 가능한 정보 관리 전략의 일환입니다.
Unger는 이렇게 말합니다. "디지털 전달의 목적은 UDOT가 정적 데이터 대신 동적 데이터를 사용해 모든 자산의 현재 상태를 표현하도록 전환하는 것입니다." 데이터는 Site Scan for ArcGIS를 사용해 드론으로 수집되어 엔드 투 엔드 드론 관리와 ArcGIS 시스템과의 직접 통합을 지원합니다. 이를 통해 UDOT는 디지털 전달 프로세스의 설계 데이터를 프로젝트 건설 도중 및 이후에 수집된 영상과 손쉽게 중첩할 수 있습니다. 이렇게 하면 프로젝트가 계획되고 구현된 방식의 정확성을 비교하는 데 도움이 됩니다.
 UDOT에 있어 디지털 전달은 프로젝트 전달 프로세스의 디지털화를 의미합니다.
UDOT에 있어 디지털 전달은 프로젝트 전달 프로세스의 디지털화를 의미합니다.
한 가지 예시로는 통관항 프로젝트에 대해 수집된 드론 영상의 고도와 비교한 설계 표면에 UDOT가 절성토 분석을 사용한 것을 들 수 있습니다. 이러한 유형의 분석을 통해 UDOT는 도로가 너무 높게 건설되었는지, 아니면 너무 낮게 건설되었는지 알 수 있습니다. 어느 쪽이든 차량이 다니기 위험한 조건을 조성하거나, 배수가 불량해지거나, 또는 기타 잠재적으로 위험한 상황을 야기할 수 있는 시나리오입니다. 지면 고도가 설계된 것보다 낮을 경우 절토로 간주되며 지면 고도가 설계보다 높을 경우 성토로 간주됩니다.
 UDOT는 드론 영상과 설계에 절성토 분석을 사용하여 현장 고도와 설계 고도를 비교합니다.
UDOT는 드론 영상과 설계에 절성토 분석을 사용하여 현장 고도와 설계 고도를 비교합니다.
 UDOT는 Site Scan for ArcGIS의 절성토 도구를 이용해 부피 분석을 수행해야 하는 위치를 대략적으로 파악합니다.
UDOT는 Site Scan for ArcGIS의 절성토 도구를 이용해 부피 분석을 수행해야 하는 위치를 대략적으로 파악합니다.
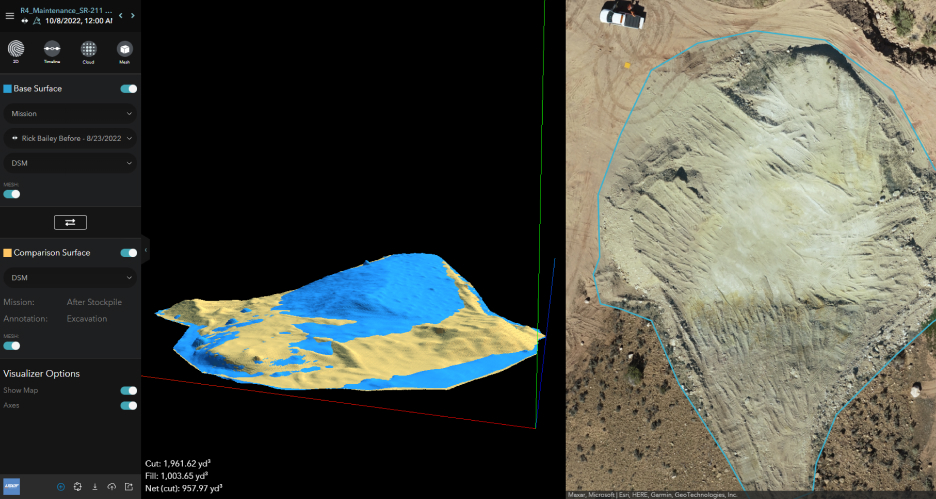 UDOT는 Site Scan for ArcGIS를 통해 절성토 분석을 수행하여 표면의 부피를 3D로 예측합니다. 파란색 영역은 드론 영상으로 포착된 표면을 나타내며 노란색은 설계 표면을 나타냅니다.
UDOT는 Site Scan for ArcGIS를 통해 절성토 분석을 수행하여 표면의 부피를 3D로 예측합니다. 파란색 영역은 드론 영상으로 포착된 표면을 나타내며 노란색은 설계 표면을 나타냅니다.
설계된 노면 표시와 실제로 노면 표시가 배치된 위치를 비교하는 데에도 이와 동일한 방법이 사용됩니다. 이 데이터를 통해 프로젝트 검사자는 건설에 설계된 피처가 배치된 위치를 검증할 수 있습니다. 이는 UDOT가 디지털 트윈을 위해 기울인 노력의 일환입니다. 이러한 배치의 정확성이 검증되고 나면 해당 표시는 기관의 자산 관리 시스템에 입력되며, UDOT는 이를 이용해 자산의 수명 주기를 추적하고 이에 따라 유지관리 작업 일정을 계획할 수 있습니다.
 UDOT는 프로젝트 설계의 차선 표시 배치를 건설 현장에 표시가 실제로 구현된 위치와 비교합니다.
UDOT는 프로젝트 설계의 차선 표시 배치를 건설 현장에 표시가 실제로 구현된 위치와 비교합니다.
Site Scan for ArcGIS를 통해 데이터를 수집하자 디지털 트윈 달성에 가까워지는 데 도움이 되었지만, UDOT는 여전히 프로세스에서 수작업으로 검사를 진행하고 영상에서 자산을 추출해야 했습니다. Unger가 말합니다. "비행사가 도로의 일부분을 비행하고 나면 분석가가 영상을 받아 ArcGIS Pro에서 노면 상태와 스트라이핑 정보를 수작업으로 묘사합니다. 이 방식에는 시간이 많이 소요됩니다." 이러한 이유로, UDOT는 Site Scan for ArcGIS에서 수집한 드론 데이터를 GeoAI 머신 러닝 모델을 통해 직접 전송한 다음 스트라이핑 데이터를 데이터베이스로 바로 추출할 수 있는 자동화된 프로세스를 탐색하기 시작했습니다.
UDOT는 해당 부서가 자산을 수작업으로 디지털화하는 방식에서 자동 프로세스를 활용하는 자산 감지 방식으로 전환할 수 있도록 머신 러닝 모델과 방법을 구축하기 위해 Esri Advantage Program을 통해 Esri에 도움을 요청했습니다. Esri는 UDOT의 프로그램을 검토했고 권장 모범 사례를 제공했습니다. Esri는 규칙 기반 모델링을 제안했습니다. 이 모델링은 이미지에 사전 정의된 규칙 세트를 적용하여 탐색적 평가를 수행합니다.
Site Scan for ArcGIS에 저장된 UDOT의 드론 데이터를 분석하는 동안 팀원들은 정사보정된 영상 및 포인트 클라우드의 두 가지 형식을 검토했습니다. 팀원들은 차선 스트라이핑, 요철 처리 부분, 노면 디스트레스, 표지판, 방음벽, 교통 안전 장벽 등의 다양한 자산에 해당하는 워크플로에서 데이터를 평가하기로 결정했습니다.
초기 스트라이핑 추출 결과 예시 중 하나에서, 도로의 드론 이미지에서는 스트라이핑 라인이 실선으로 표시되어 있었지만 대응하는 분석 이미지에는 스트라이핑 라인이 끊겨 있었습니다. 이는 스트라이핑 상태가 불량하다는 뜻일 수도 있지만, 추가적인 조사가 필요합니다. 그래도 유지관리 팀이 수리가 필요할 수 있는 영역을 표적화하는 데 도움이 되는 소중한 데이터입니다.
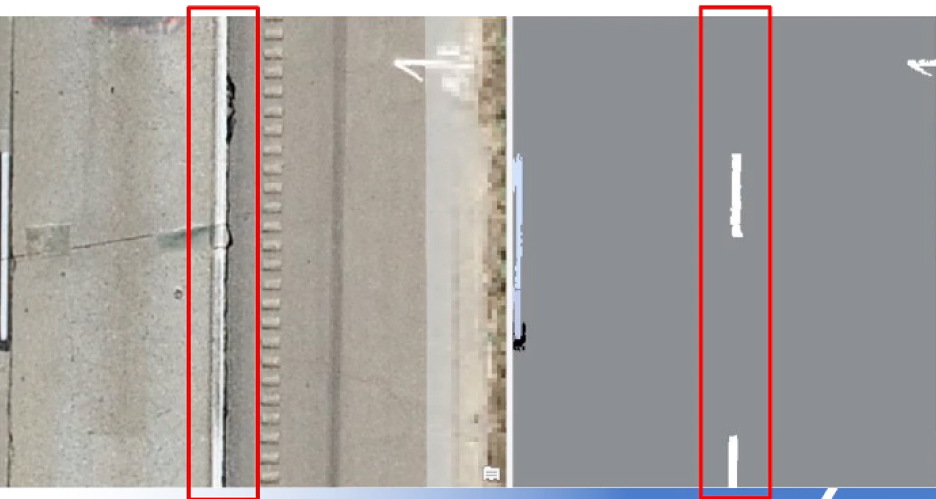 좌측 드론 이미지를 분석 결과로 도출된 우측 이미지와 비교합니다. 우측 이미지에 빨간색으로 표시된 흰색 차선은 좌측 이미지에 빨간색으로 표시된 갓길 차선과 마찬가지로 실선이어야 합니다. 하지만 우측 이미지의 스트라이핑은 끊겨 있습니다. 이는 좌측 이미지의 스트라이프에 보이는 짙은 색상 때문일 가능성이 높습니다.
좌측 드론 이미지를 분석 결과로 도출된 우측 이미지와 비교합니다. 우측 이미지에 빨간색으로 표시된 흰색 차선은 좌측 이미지에 빨간색으로 표시된 갓길 차선과 마찬가지로 실선이어야 합니다. 하지만 우측 이미지의 스트라이핑은 끊겨 있습니다. 이는 좌측 이미지의 스트라이프에 보이는 짙은 색상 때문일 가능성이 높습니다.
예비 결과의 또 다른 예시에는 고속도로의 한 부분이 나와 있습니다. 이 예시에서는 콘크리트와 아스팔트 부분을 구분할 수 있는 것은 물론 스트라이핑도 확인할 수 있습니다. 이는 표면 유형의 정확한 인벤토리를 확보하고 유지관리 팀이 어떤 유형의 표면에 복구 작업을 수행하게 되는지 파악하기 위한 주요 정보입니다.
 자동 분석을 통해 콘크리트와 아스팔트 표면을 쉽게 구분할 수 있습니다.
자동 분석을 통해 콘크리트와 아스팔트 표면을 쉽게 구분할 수 있습니다.
AI 및 머신 러닝 대상과 원격 감지된 데이터를 함께 활용하면 인프라 자산에 대한 데이터를 더 빠르고 정확하게 수집할 수 있으므로 인프라 소유자는 유지관리 요구 사항을 보다 신속히 해결할 수 있습니다. Site Scan for ArcGIS 및 Esri Advantage Program은 기관의 시간과 비용을 지속적으로 절약하면서 커뮤니티에 긍정적인 주행 경험을 제공할 머신 러닝 모델을 개발하고 자산 인벤토리를 디지털화하는 데 있어 중요한 역할을 해왔습니다.
UDOT의 목표는 드론 영상에서 자산 상태를 추출하여 자산 인벤토리를 가능한 한 최신 상태로 유지할 수 있도록 하는 자동화된 방법을 갖추는 것입니다. UDOT는 자산 추출 프로세스를 개선하고 디지털 트윈의 완성을 앞당기기 위한 노력의 일환으로 이러한 모델을 사용할 계획입니다. 딥러닝, 인공 지능, Site Scan for ArcGIS로 수집한 UAV 영상은 UDOT 성공 전략의 중요한 요소입니다.
The purpose of digital delivery is to move UDOT away from static data and instead use dynamic data to represent the current state of every asset.
경험이 풍부한 당사 영업 담당자와 상담 일정을 예약하세요. 지금 영상 및 원격 탐사 데이터를 어떻게 사용하고 있는지 알려주시면 포괄적인 공간정보 시스템이 다음에 어떤 작업을 수행할 수 있는지 알려 드리겠습니다.