Fall 2009
Fall 2009 |
||||||||
|
|
||||||||
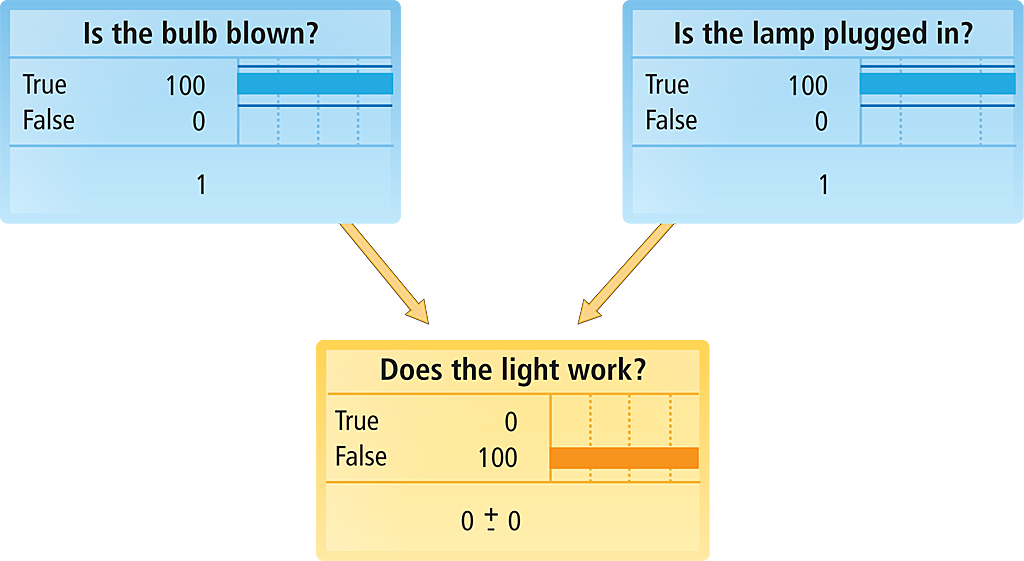
The primary feature of a belief network is its ability to "learn" and continually refine the extent of a relationship between two variables by using conditional probabilities. Instead of making educated guesses between two factors, a user (or in the case of CRAFT, a group of users) can create a network, make observations on those variables, and compile the findings as cases. It is from these cases that the belief network software determines the conditional probabilities between two variables. While the theory underlying Bayesian statistics is complex, a software package commonly used for belief network modeling—Norsys Netica—is approachable, graphic, and intuitive. In addition, outputs are not as intimidating as the results generated by many statistical packages. Belief networks are useful for CRAFT and other risk assessment tools but have not been linked to GIS so variables can be placed in a spatial context. Although some networks, such as ones used to determine a likely disease diagnosis for a given set of symptoms, do not have an appropriate spatial context, for other networks, such as models used to determine likely forest health given a set of threats, spatial context is critical. This information can answer questions like, What areas of forests are most at risk? and Where can mitigation efforts be prioritized to leverage limited resources? Researchers at the University of North Carolina at Asheville's National Environmental Modeling and Analysis Center (NEMAC) looked for current solutions to tie belief network models to a GIS that would support the use of CRAFT but couldn't find anything that allowed for in-depth risk analysis or had a suitably generic process. It was critical that the process be general enough to apply to any spatial risk assessment from invasive species to wildfires to landslides. Consequently, NEMAC decided to write its own tool using the ArcGIS Desktop application ArcMap and incorporating Python scripts and Netica, a program for working with Baysian belief networks from Norsys Software Corp. As a test case to develop the method, NEMAC investigated the risk that an invasive species known as Japanese stilt grass, or Microstegium vimineum (MIVI), would encroach on an area near Hot Springs in the Pisgah National Forest in North Carolina. Invasive species data was collected by Equinox Environmental (equinoxenvironmental.com), a consulting and design firm.
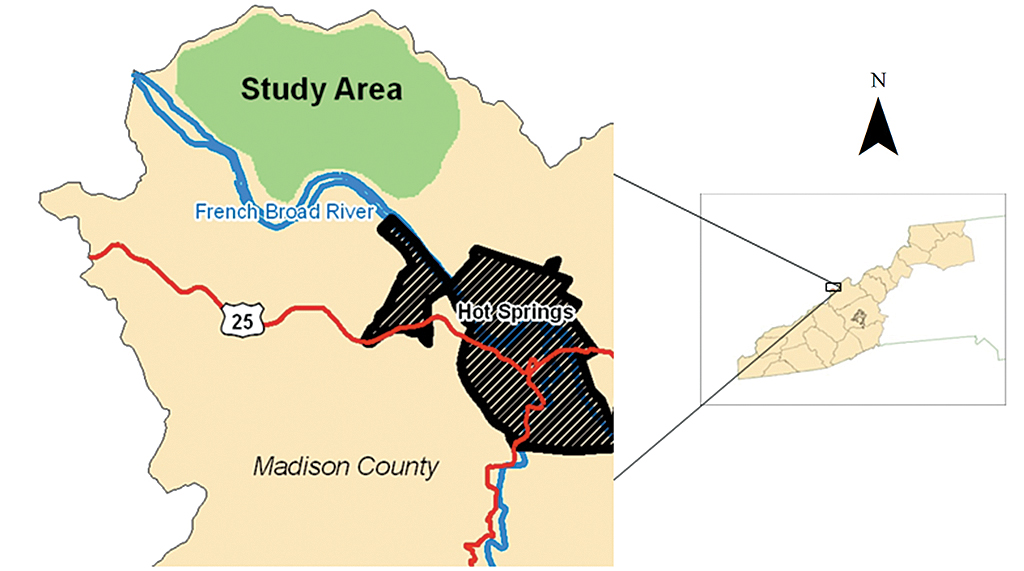
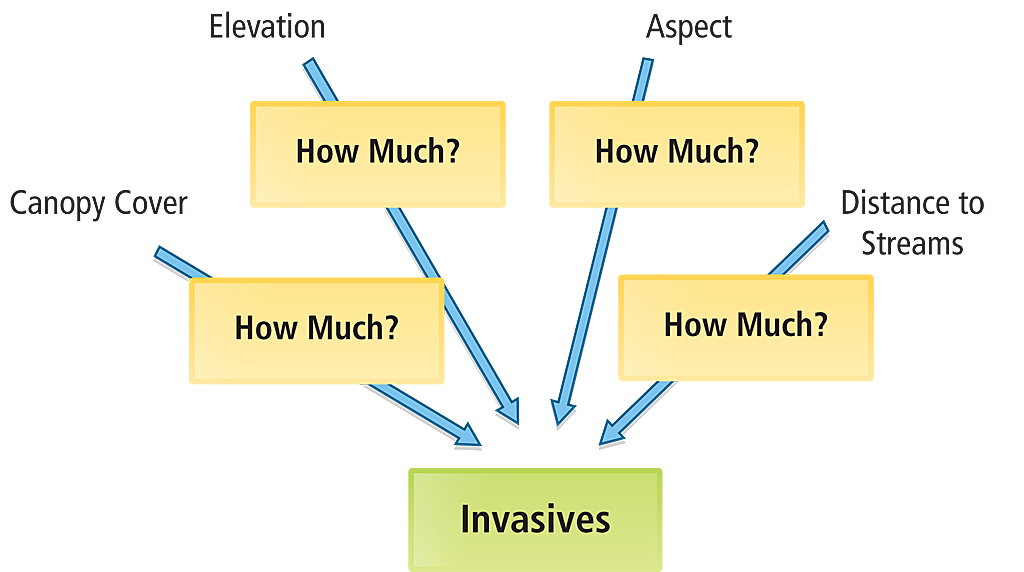
Within the study area (see Figure 2), Equinox Environmental collected GPS survey paths and marked every MIVI occurrence as a point feature. The paths were locations where MIVI was known to be absent and the points were locations where MIVI was known to be present. With the proposed process, this information could then be used to assess the risk of MIVI occurring in the rest of the study area that had not been surveyed. Simply put, the absence of evidence was not evidence of absence. First, a conceptual model (Figure 3) was created in consultation with scientists from EFETAC. [EFETAC, established by the U.S. Forest Service, uses an interdisciplinary approach in developing new technology and tools that anticipate and respond to threats to eastern forests.] While tracking the factors associated with the location of invasive species is incredibly complex, NEMAC simply sought to test a method for putting geographic information into a Bayesian statistical context and returning the results to geographic space. As a result, the location variables used were based on a trusted data source, The National Map Seamless Server, a data resource provided by the U.S. Geological Survey that is publicly available and easily accessed.
The process for preparing data in ArcMap, exporting data to Netica, performing analysis in Netica, and importing the results back into ArcMap is summarized in the following five stages. Stage 1: Location Data Preparation
Stage 2: Survey Data Preparation
Stage 3: Data Combination and Export
Stage 4: Export Data from ArcMap and Import It into Netica
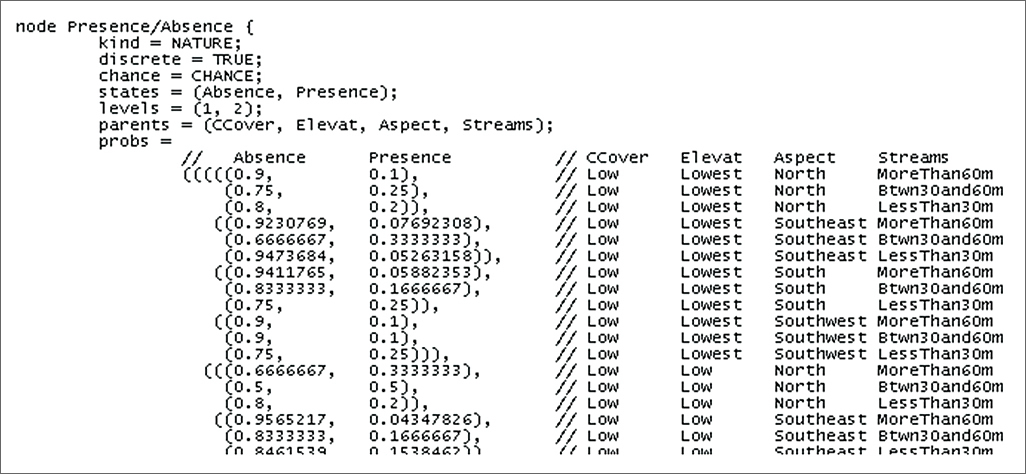
For example, the first row might represent a location where MIVI was present, had a moderate canopy cover, was at the highest elevation state, had a south aspect, and was more than 60 meters from a stream. Netica moves on to the next row where the conditions might have been different. After Netica goes through the entire study area, it calculates the probability of each state occurring in the presence/absence node given every possible combination of states in the location nodes. Netica can assert that for the stated combination described previously, there is a 16.7 percent chance that MIVI will occur in places with those conditions. In Netica, users can interact with the network to model what-if scenarios. As a user clicks on different states in each node and sets them to 100 percent certainty, the probabilities represented in each other node (based on what is known so far) are updated and displayed. These hypothetical situations do not alter the probability tables. Rather, they show how other variables respond when one or more variables are set to certain states. Stage 5: Export Data from Netica and Import It Back into ArcMapNetica stores the conditional probability tables as a Netica network file that shows the probability of each state in the response node for every combination of node state combinations.
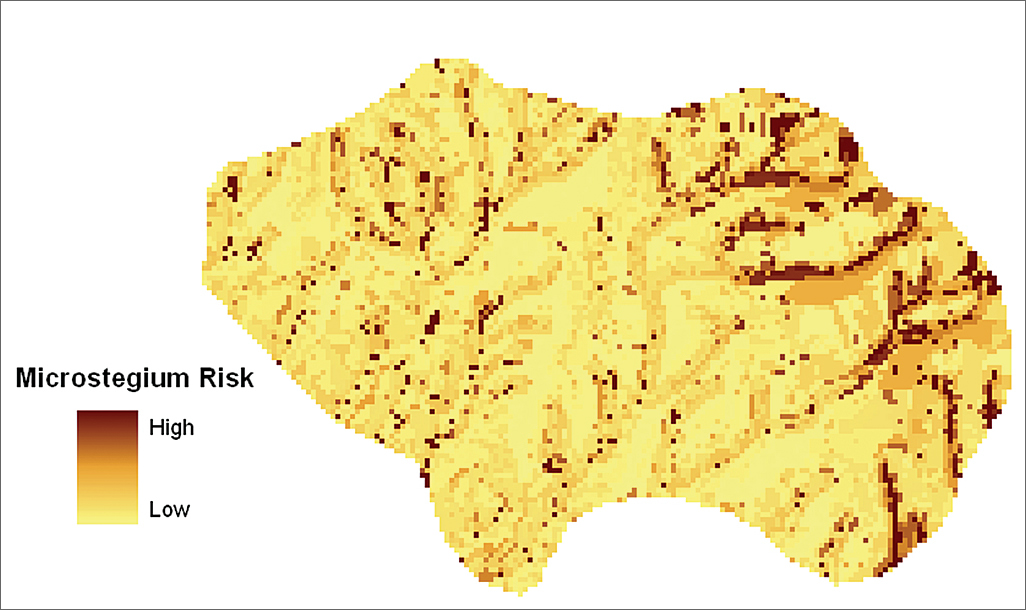
At this point, every cell of the survey raster has a probability for MIVI presence. When this field is symbolized and displayed, the result is a risk map for MIVI presence. Given the simplicity of the variables investigated, this risk map is probably not the most accurate assessment of where one might find MIVI. However, this method allowed NEMAC to successfully take geographic information, use Bayesian statistical analysis, and present the results in a geographic context. NEMAC is working with EFETAC to refine the belief network-GIS link and use it in other studies and upcoming CRAFT projects. Most significantly, this process is not limited to invasive species risk. NEMAC is investigating other potential uses for the process to ensure its generality and is also working to simplify and automate the process, more tightly integrating ArcMap and Netica. For more information, visit the NEMAC Web site (nemac.org) or contact the authors, Jeff Hicks at jhicks@unca.edu or Todd Pierce at tpierce@unca.edu. AcknowledgmentThe authors thank Dr. Danny Lee and Dr. Steve Norman at EFETAC and Karin Lichtenstein, Jim Fox, and Alex Krebs at NEMAC for their assistance and advice. About the AuthorsJeff Hicks is a recent graduate of the University of North Carolina Asheville Environmental Studies program. With a varied background in multimedia and graphic design, he was drawn to GIS because it combined his interests in technology and the environment. He began his work on the belief network-GIS link as a student intern for NEMAC and has gone on to become geospatial analyst at NEMAC. Hicks currently is a key contributor to a collaborative effort with the U.S. Forest Service in the production of the Western North Carolina Report Card on Sustainability. He also assists with research on creative ways of integrating geographic data in visualization environments. Dr. Todd Pierce has worked in GIS for more than 18 years and has specialized in GIS and Web programming for 12 of those years. He holds a B.S.E. degree in electrical engineering from Tulane University and a doctorate in geography from Oxford University in the United Kingdom. He is responsible for linking GIS and databases to the Web at NEMAC, where he leads the development of an online multihazard risk tool for mitigation planning. He also assists with development of geographic decision facilitation processes that use Web applications and data visualization techniques to support public policy decision makers with land-use planning; flood mitigation and response; forest preservation; and other community issues. |