Summer 2002
Summer 2002 |
|||||||
|
|
|||||||
Exposing the Seafloor with GIS |
|||||||
|
By Vanessa Halley and Miles Lawler, Tasmanian Aquaculture and Fisheries Institute, Tasmania, Australia
The Australian State of Tasmania is renowned for its rugged mountains and lush temperate rain forests. Since navigator Abel Tasman's visit in 1642, the process of charting the coast and mapping the terrestrial features has been ongoing. It has only been in recent times that this mapping focus has turned to what is under the waves--the marine environment. Scientists at the Tasmanian Aquaculture and Fisheries Institute (TAFI) embarked on a process of mapping the coastal seafloor through a project called SEAMAP Tasmania. Initial mapping of southeastern Tasmania was conducted with the support of the Australian federal government under the Natural Heritage Trust scheme. The information gained in the initial phase of SEAMAP Tasmania has direct application to marine resource development, fisheries management, local government planning, and large-scale environmental reporting and monitoring. Commercial wild fishing adds $160 million a year to the State's economy, with more than 90 percent of this amount coming from two reef species: abalone and rock lobster. Information on the distribution of reef habitat will allow more effective spatial management of the two species. Marine farming is also becoming an important component in Tasmania's economy, and information on habitat distributions is integral to the sustainable development of this industry. The integration of spatial habitat data into management decisions will ensure better management of Tasmania's marine resources. Data collection for SEAMAP Tasmania involved a combination of aerial photography and extensive field surveys. The first phase of the project generated comprehensive habitat maps (at a scale of 1:25,000) for southeastern Tasmanian waters to the 40 meter-depth contour. Habitat categories were broadly mapped under three main types: rocky reef, unconsolidated substrates (sand, silt, etc.), and vegetated unconsolidated substrates (seagrasses) and aquatic macrophytes.
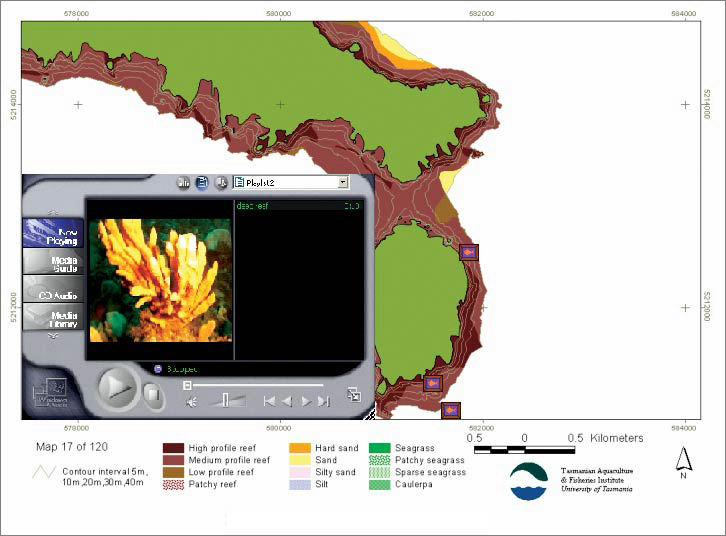
Existing aerial photography for the region was examined, and images showing reef and seagrass were selected. These were then scanned using an A4 scanner and rectified in ArcInfo. The corrected images were viewed in ArcView 3.2 and habitat boundaries digitized. Scales of 1:12,500 gave sufficient resolution for habitat boundaries to be determined to approximately the eight-meter depth contour, but this was highly dependent on water quality. Many photos had been taken in suboptimal conditions for marine applications, which included windy days, sun reflection, or excessive cloud cover. Due to the limitations of using aerial photography for marine mapping, comprehensive field surveys were conducted. Field surveys were conducted from small vessels fitted with a differential GPS and acoustic sounder. The boat was driven over a series of transects perpendicular to shore and a maximum of 200 meters apart providing a comprehensive coverage of the study area. More than 250,000 individually attributed data points were collected over 10 months of field surveys. Ground truthing provided substantial habitat information and physical data on depth and substrate type that were not available from photographs. In addition to confirming the aerial photointerpretations, field observations extended habitat classifications to depths of 40 meters and to areas inshore where there was no suitable photo coverage. A software program called Seabed Mapper 2.4 was developed in Visual Basic, which greatly improved the coordination of the various data sources being logged in the field. It enabled field operators to log differentially corrected GPS data and depth alongside substrate type (identified from a combination of the echo sounder and video drops) along with comments on the biotic community present (identified from video drops). Habitat discrimination in the field was made using a Furuno 600L color sounder at frequencies of 50 and 200 Hz. The 50-kHz signal gave better substrate definition in deeper waters (>30 m) while the 200-kHz signal was used in shallower waters. Substrate types were characterized by differences in the sounder trace based on roughness and hardness. This signal was interpreted in the field and logged in real time in conjunction with camera drops, enabling good habitat discrimination. In shallower waters (<5 m), it was often possible to determine substrate type by using an underwater viewer. Strong second echoes on the sounder output indicated hard substrates, while long tails on these traces characterized rough substrates.
A submersible Benthos 4208 8x zoom color video camera was deployed at selected sites to verify echo-sounder classifications and obtain more detailed information on habitat attributes. In addition, video transects were conducted at regular intervals on rocky reef areas perpendicular to the shore along the depth gradient. Depth, substrate, position, and dominant macroalgal species were recorded at regular video drop depth intervals for each transect. The video footage was reviewed in the laboratory and, in conjunction with the field notes, used to estimate the percentage cover of the major dominant algal species. This information was correlated against depth and exposure to determine characteristic biotic community types for combinations of each of the physical variables or habitats. A representative image was taken from a range of depths at each video transect site and archived. Data files from the Seabed Mapper program were imported into ArcView 3.2, as well as habitat point data, which was used to generate shapefiles by on-screen digitizing of habitat boundaries. At 1:2,000 scale the points were carefully connected to form polygons of similar habitat type. The outer boundary of the polygon was generally identified in the field, and with these points overlaid on aerial photographs, a habitat boundary was identified and a polygon drafted. The rectified aerial photographs were primarily used to help determine the boundaries between shallow sand and reef. Shapefiles of the habitat types have been stored on the ArcView 3.2 GIS platform. Three hundred video stills and short videos have been hot linked to the polygons allowing the user to visualize the dominant species and understand what the habitat, which is represented as a colored polygon on the spatial map, actually looks like. One hundred and twenty 1:25,000 habitat maps of the region have been generated and are available through TAFI, coinciding with the release of the 2001 report Mapping of Inshore Marine Habitats in Southeastern Tasmania for Marine Protected Area Planning and Marine Management--Tasmanian Aquaculture and Fisheries Institute, University of Tasmania, Hobart Tasmania, Australia, by N. Barrett, J.C. Sanderson, M. Lawler, V. Halley, and A. Jordan. The work presented here will lead to a more detailed understanding of the resources of Tasmanian coastal waters and, from the strength of the GIS platform established, will allow more detailed community descriptions to be developed in the future as resources become available to conduct fine-scale biological inventories. For more information, contact Vanessa Halley or Miles Lawler, Marine Environment Section, Tasmanian Aquaculture and Fisheries Institute, Nubeena Crescent, Taroona, Tasmania, Australia (e-mail: vhalley@dpiwe.tas.gov.au, Web: www.utas.edu.au/docs/tafi/TAFI_Homepage.html). |